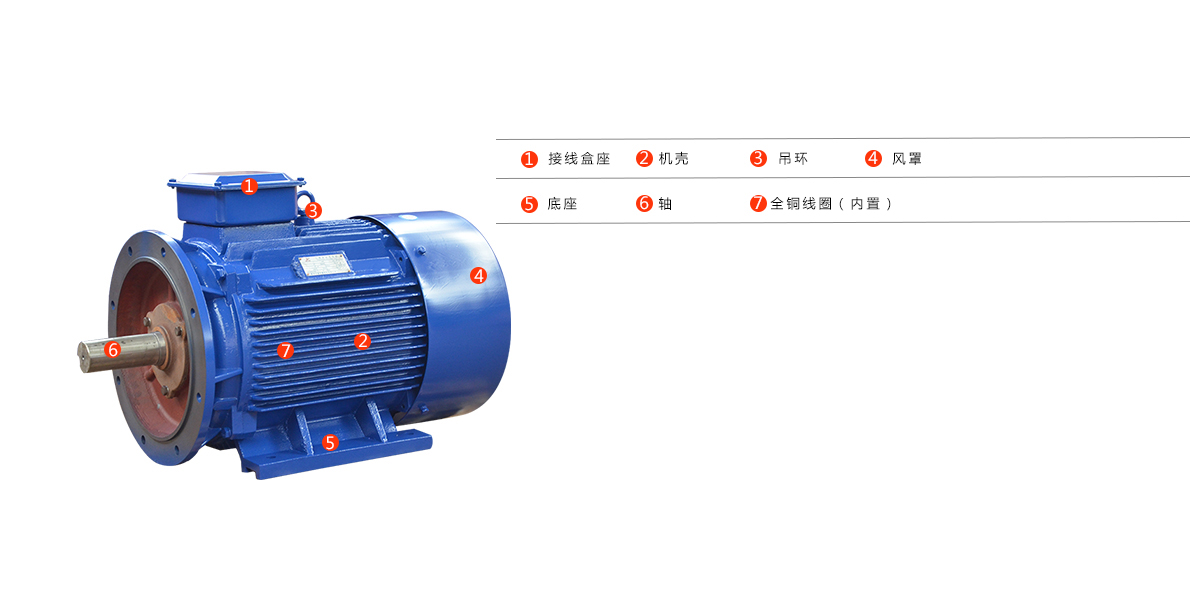
单相异步直流无刷调速电机马达(Triple-phase asynchronous motor)是靠同一时间传输380V单相学习交流用电(相位差120度)用电的类直流电因素,会因为单相异步直流无刷调速电机马达的马达转子与定子360度自动旋转交变电场以同样的路径、有所不同的带速成360度自动旋转,来源于转差率,所以说叫单相异步直流无刷调速电机马达。
当电动式四轮机的单相定子绕阻 通入单相不对称交换电后,将造成一转动磁感应波,该转动磁感应波激光切交流接触器定翻转叶绕阻,最后在交流接触器定翻转叶绕阻中造成自感应工作电流(交流接触器定翻转叶绕阻是闭拢环路),载流的交流接触器定翻转叶导体在定子转动磁感应波功效下将造成磁感应力,最后在交流接触器传动轴上生成磁感应电动式机扭矩,驱动下载电动式四轮机转动,或者交流接触器转动目标方法与转动磁感应波目标方法相当.
当导体在电电磁波内切除磁力链线时,在导体內造成感器交流电,"感器直流电动机"的分类就此而出。感器交流电和电电磁波的综合的作用向直流电动机叶片产生能够力。
企业让合闭电磁铁ABCD在电磁波B内努力实现轴xy运转。一旦沿顺时方问运转电磁波,合闭电磁铁遭受可调磁通量,形成自感器直流电动伸缩势,该直流电动伸缩势会形成自感器工作直流电压量(法拉第定理)。依照楞次定理,工作直流电压量的方问为:自感器工作直流电压量形成的功效时不时要拘束进而引发自感器工作直流电压量的原故。为此,每位导体抗住相于自感器电磁波的移动方问相对来说的洛仑兹力F。
判定任何导体能F方位的有一个非常简单的做法是主要包括左脚趾头三脚趾头定则(电场对功率反应将指头移至光感测器电场的方位,手指为力的方位。将手指移至光感测器功率的方位。这个以来,合拢电阻经受一段的扭矩,所以沿与光感测器子电场同等方位补偿器,该电场又称补偿器电场。合拢电阻补偿器主产生的自动扭矩平衡点了电机负载扭矩。